






Olcsó árlista a kínai pneumatikus rozsdamentes acél egészségügyi élelmiszerszint pillangószelephez

Üzleti vállalkozási filozófiánk, hogy sokkal több értéket teremtsünk a potenciális ügyfelek számára; vevők növekvő a mi munka hajsza olcsó árlista Kínában pneumatikus rozsdamentes acél egészségügyi élelmiszer-szint pillangószelep, várjuk, hogy érdeklődjön tőlünk kapcsolatfelvételi vagy e-mail, és reméljük, hogy egy hatékony és együttműködő romantikus kapcsolat.
Üzleti vállalkozási filozófiánk, hogy sokkal több értéket teremtsünk a potenciális ügyfelek számára; a vásárlók növekedése a mi keresünkA Valve készítette, Szelep megmunkálás, Arra törekszünk, hogy világszerte megfeleljünk ügyfeleink igényeinek. Megoldásaink és szolgáltatásaink köre folyamatosan bővül, hogy megfeleljünk az ügyfelek igényeinek. Szeretettel várjuk új és régi ügyfeleinket az élet minden területéről, hogy kapcsolatba léphessenek velünk a jövőbeni üzleti kapcsolatok és a kölcsönös siker érdekében!
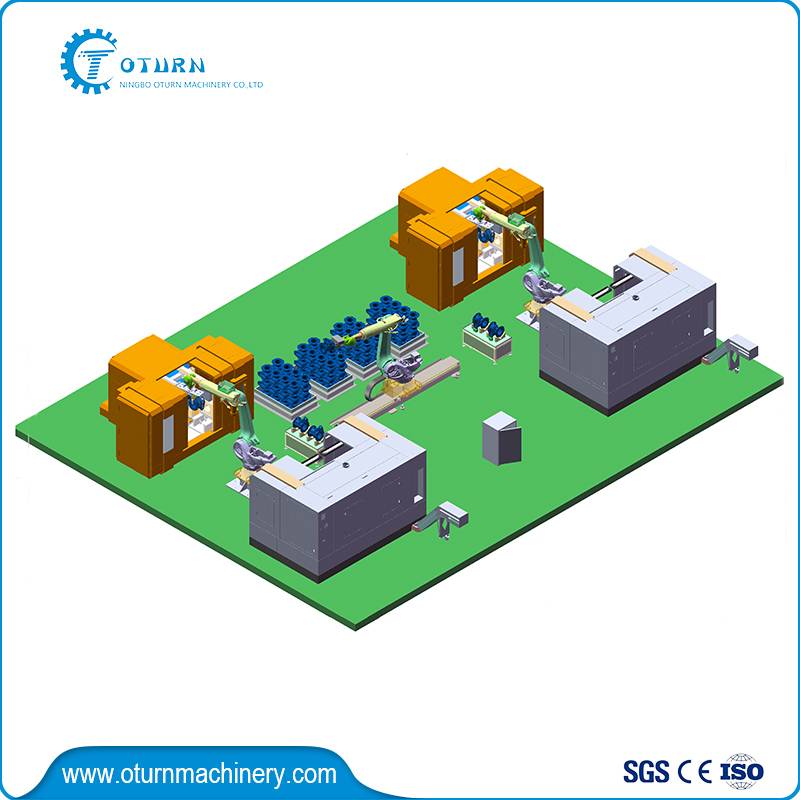
1. A kezelő a szeleptest munkadarabjaival teli raklapot az 1. berakodási pozicionáló résbe és a 2 berakodási pozicionáló résbe helyezi a pozicionáláshoz, az üres tálcát pedig az 1 berakodási pozicionáló résbe és a 2 kirakodási pozicionáló résbe helyezi a pozicionáláshoz.
2. Az 1 roboton lévő kamera pásztázza a raklapon lévő munkadarabot az 1 adagoló pozicionáló résben, hogy pontosan pozícionálja a munkadarabot, majd az 1 munkadarabot rögzíti és az 1 ütközőasztalon lévő pozicionáló rögzítőelembe helyezi.
Ezzel egyidejűleg megfogja a megmunkált 3 munkadarabot (a 2 robot éppen a 2 szerszámgépről ragadta meg), átmegy az 1 kirakodó pozicionáló résbe és igény szerint szépen a raklapba helyezi.
Az 1 roboton lévő kamera pásztázza a raklapon lévő munkadarabot a 2 adagoló pozicionáló résben, hogy pontosan pozícionálja a munkadarabot, majd a 4 munkadarabot rögzíti és a 2 ütközőasztalon lévő pozicionáló rögzítőelembe helyezi.
Ezzel egyidejűleg megfogja a megmunkált 6 munkadarabot (a 3 robot éppen a 4 szerszámgépről ragadta meg), a 2 kirakodó pozicionáló résbe költözik és igény szerint szépen a raklapba helyezi.
3. A 2 robot befogja az 1 munkadarabot az 1 pufferasztalról és az 1 szerszámgéphez fut, megfogja a kész munkadarabot 2 és befogja az 1 munkadarabot, a 2 szerszámgéphez fut, megfogja a kész munkadarabot 3 és befogja a 2 munkadarabot , és a pufferasztalhoz fut 1. Helyezze el a munkadarabot 3. A 2. robot befejezi a ciklust.
4. A 3 robot megfogja a 4 munkadarabot a 2 pufferasztalról és a 3 szerszámgéphez fut, megfogja az 5 kész munkadarabot és befogja a 4 munkadarabot, a 4 szerszámgéphez fut, megfogja a 6 kész munkadarabot és befogja az 5 munkadarabot , és a pufferasztalhoz fut 2. Helyezze el a munkadarabot 6. A 3. robot befejezi a ciklust.



 Üzleti vállalkozási filozófiánk, hogy sokkal több értéket teremtsünk a potenciális ügyfelek számára; vevők növekvő a mi munka hajsza olcsó árlista Kínában pneumatikus rozsdamentes acél egészségügyi élelmiszer-szint pillangószelep, várjuk, hogy érdeklődjön tőlünk kapcsolatfelvételi vagy e-mail, és reméljük, hogy egy hatékony és együttműködő romantikus kapcsolat.
Üzleti vállalkozási filozófiánk, hogy sokkal több értéket teremtsünk a potenciális ügyfelek számára; vevők növekvő a mi munka hajsza olcsó árlista Kínában pneumatikus rozsdamentes acél egészségügyi élelmiszer-szint pillangószelep, várjuk, hogy érdeklődjön tőlünk kapcsolatfelvételi vagy e-mail, és reméljük, hogy egy hatékony és együttműködő romantikus kapcsolat.
Olcsó árlista a kínai egészségügyi pillangószelephez, higiénikus szelephez, arra törekszünk, hogy ügyfeleink igényeit világszerte kielégítsük. Megoldásaink és szolgáltatásaink köre folyamatosan bővül, hogy megfeleljünk az ügyfelek igényeinek. Szeretettel várjuk új és régi ügyfeleinket az élet minden területéről, hogy kapcsolatba léphessenek velünk a jövőbeni üzleti kapcsolatok és a kölcsönös siker érdekében!




